How do insectivorous bats manage to locate prey that should be “invisible” to them? A new Israeli study shows that when insects fly in a swarm, they suddenly “reveal” themselves to their predator.
Advertisement
Bats are also known as “those who see in the dark,” because even in the total absence of light most of them can locate prey using sound waves (sonar, or echolocation): the bats navigate by emitting sound waves into space and constructing a three-dimensional image of their surroundings from the returning waves that bounce off nearby objects (echoes).
But bats cannot locate every insect with sound waves. Very small insects with a minimal surface area (for example, mosquitoes) do not return an echo efficiently for the bat. For this reason, the question of how bats hunt insects that theoretically should be “invisible” to them has remained a mystery.
First, how do we even know they hunt these insects? DNA analyses and chemical tests of bat droppings have revealed their diet, and small insects indeed make up a significant part of the menu. Second, how do they manage to eat them without “seeing” them? An Israeli study conducted at Tel Aviv University, led by Prof. Yossi Yovel and published in the scientific journal PLoS Computational Biology, examined the magnitude of the echo produced by many small insects flying in a swarm. Each insect returns a weak echo, but when they fly in a swarm there is an exponential amplification of the echo.
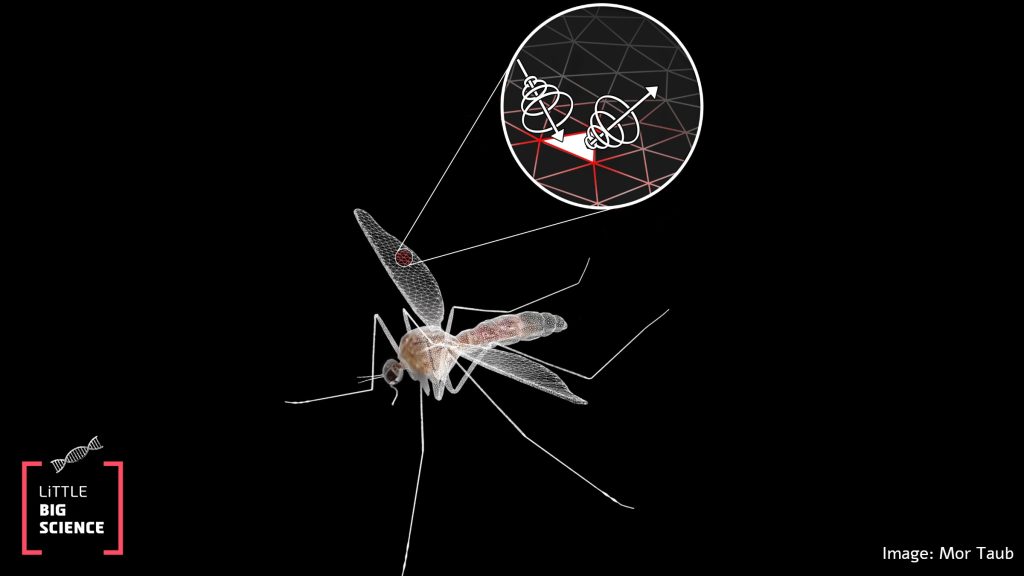
To investigate the phenomenon, the researchers created a three-dimensional virtual image of a mosquito (as an example of prey) and, using simulation, directed insect-eating bat calls toward the mosquito and recorded the returning echoes. When the insect was alone, the returning echo was too weak, and the insect was therefore “invisible” to the bat. Every time the number of insects in the swarm was doubled, the returning echo increased by 3 decibels. This innovative simulation allowed the researchers to control all input variables: the distance between insects, the number of insects, insect shape, the bat’s emission frequencies, the number of calls, and so on. Such a study cannot be performed in nature or in the lab, because we can never control an insect swarm or the bat’s calls in this way. Hence the need for such a simulation.
The echo returned from an insect swarm is sometimes not loud at all for a bat due to destructive interference of the returning sound waves (i.e., waves of the same frequency with a half-cycle phase difference cancel each other out), depending on the frequencies the bat uses. The prevailing assumption had been that the best way to locate prey was to use a single fixed frequency, yet field recordings show that insect-eating bats slightly vary their frequency during a call. Why do they do this? The researchers found through the simulation that varying the frequency during a call dramatically increases the likelihood that the bat will detect the swarm. It is essentially like spreading bets: some frequencies will be suitable for detecting the insects and others will not. Therefore, it benefits the bat to use a range of frequencies and thus raise the probability of identifying the swarm—the bat does not know in advance which frequency will work best when it begins calling.
After obtaining these surprising results, the researchers tested the findings in the field on insect swarms and found that the echo returned from an entire swarm in response to bat calls is far stronger than that from a single insect.
The researchers propose a practical use for the basic knowledge gained from the study: the insect-detection techniques of bats can be applied to small targets flying in various environments, for example radar detection of flocks of migrating birds or swarms of drones in military contexts. In an earlier laboratory study, an autonomous navigation system based on bat echolocation was developed. The current study will help improve the use of echolocation as a navigation technology for vehicles and drones to map their surroundings more efficiently, such as in agriculture, where drones are already used to inspect crops like grapes or dates.
In the main picture: a mesh model of an insect on which the researchers ran the simulations in this study. Each triangular surface represents an echo that returns to the transmitter in the virtual space. Credit: Mor Taub.
** Dr. Arjan Boonman is a research fellow in the Yovel lab at Tel Aviv University and one of the authors of the research paper. He is an international expert in animal echolocation and sound.
English editing: Elee Shimshoni
References:

Yomiran is the General Manager of the NGO "Little, big Science". He is a doctoral candidate in the Department of Zoology at Tel Aviv University, where he researches bats' genetics, he holds a master's degree in Biology from the Technion.





